Ultraschall Abstandsmessung ESP32
An einem FENDT-Weinbergschlepper soll für ein hydraulisch gesteuertes Anbaugerät eine Ultraschall-Abstandsmessung mit einem Raspbery Pi kontruiert und einsatzfertig aufgebaut werden.
Das Projekt wurde bereits in einer Vorversion mit einem konventionellen Microcontroller gebaut und ist seit 2 Jahren im Einsatz [siehe Youtube-Video Version1...].
Nun soll eine verbesserte Version zusätzliche Mess-Sensoren aufnehmen und auch die Bedienung per Smartphone oder Tablet-PC ermöglichen.
Planung und Fertigstellung 2021
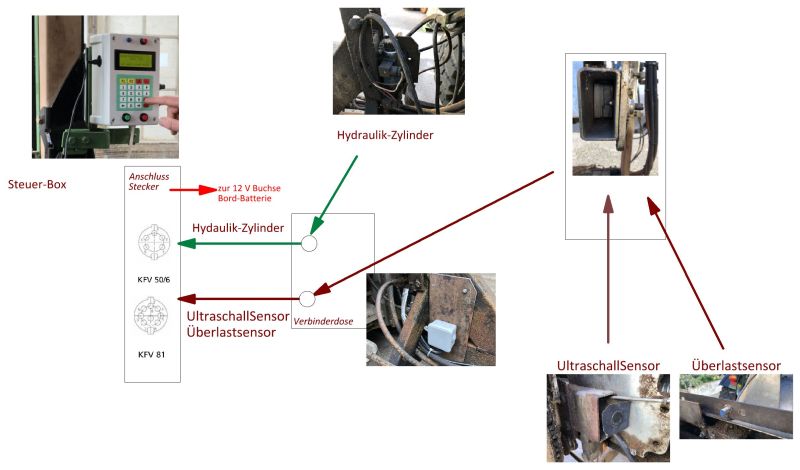
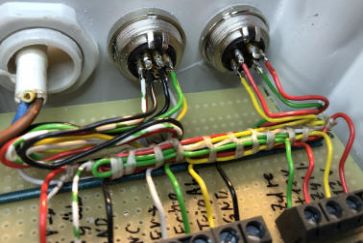
Die alte Steuerung soll durch eine komfortable Steuerbox mit wasserdichter Tastatur ersetzt werden. Die Anschaltung der Hydraulik-Zylinder und der Sensoren erfolgt über mehrere Verbinderdosen, die an geschützten Stellen des Anbaugeräts positioniert werden.
Das folgende Video zeigt einige Entwicklungsschritte und
die Anwendung im Praxiseinsatz.
Unten sind einige Arbeitsschritte dokumentiert.
Wichtige Entwicklungsschritte
Planung Blockschaltbild
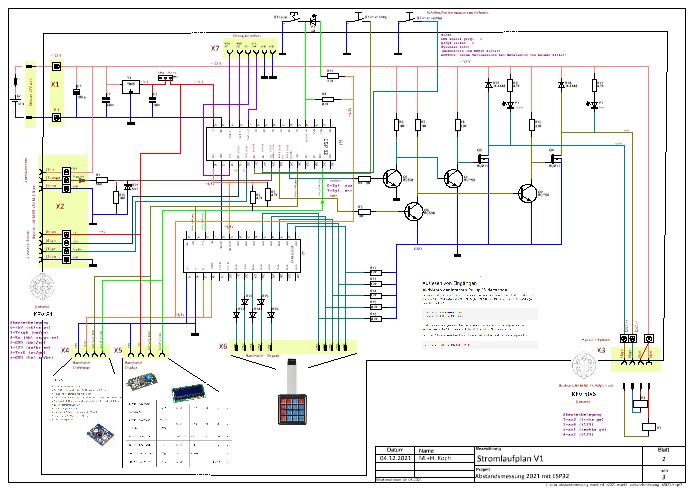
Der Stromlaufplan der Leiterplatte wurde zunächst grob
entworfen und musste im Laufe der Herstellung des Prototyps mehrere Male
erweitert werden.
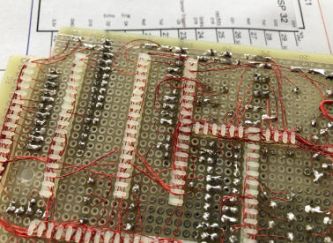
Die Bestückung des Prototyps erfolgt auf einer
Labor-Leiterplatte. Diese Entscheidung erweis sich im Laufe des Projekts als
richtig, da es immer wieder Schaltungsanpassungen gab, die auf einer gedruckten
Leiterplatte nicht mehr umsetzbar gewesen wäre.
Impressionen zum Aufbau und Funktionstest
Bestückung der Prototypen-Leiterplatte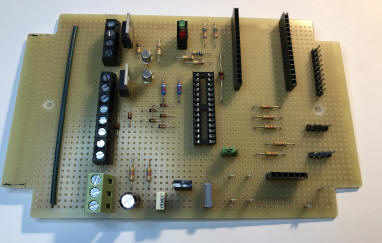
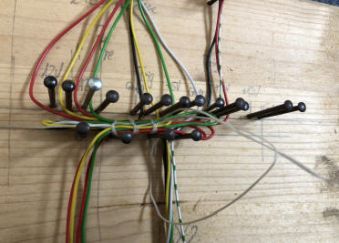
Verdrahtung der Steuerbox



Einbau vor Ort


